




รายละเอียดเชิงเทคนิคของหุ่นยนต์และสนามแข่ง
 |
 |
ในการแข่งขัน แต่ละกลุ่มจะมีหุ่นยนต์ 2 ตัว มีลักษณะและส่วนประกอบเหมือนกันทุกประการ แต่ละตัวมีสนามของตัวเอง สนามทั้งสองจะไม่สีเส้นทางที่เชื่อมถึงกัน แต่จะต้องสองคล้องกัน เพื่อหุ่นยนต์ทั้งสองจะได้ช่วยกันทำงาน
หุ่นยนต์ KU Corobots
 |
 |
 |
 |
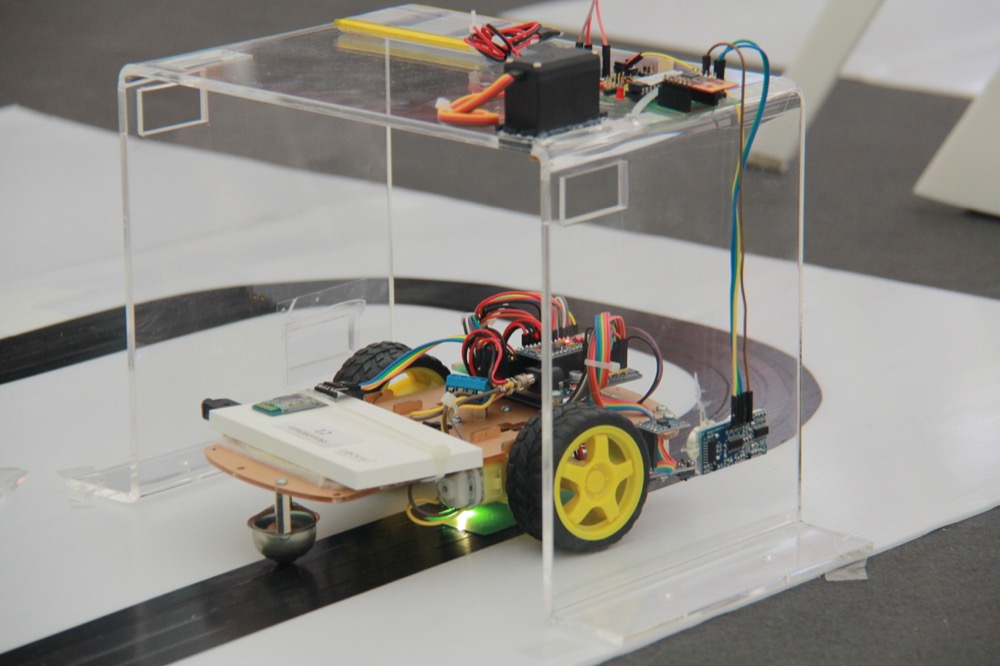
หุ่นยนต์ทั้ง 2 ตัวจะมีส่วนประกอบที่เหมือนกันทั้งหมด ดังนี้
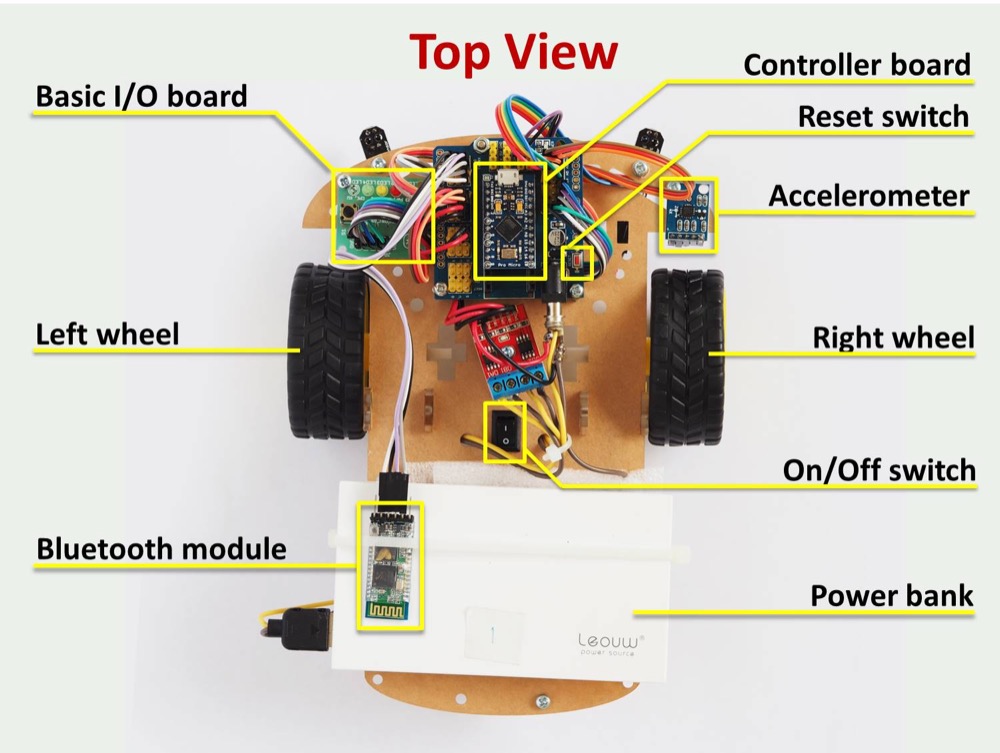
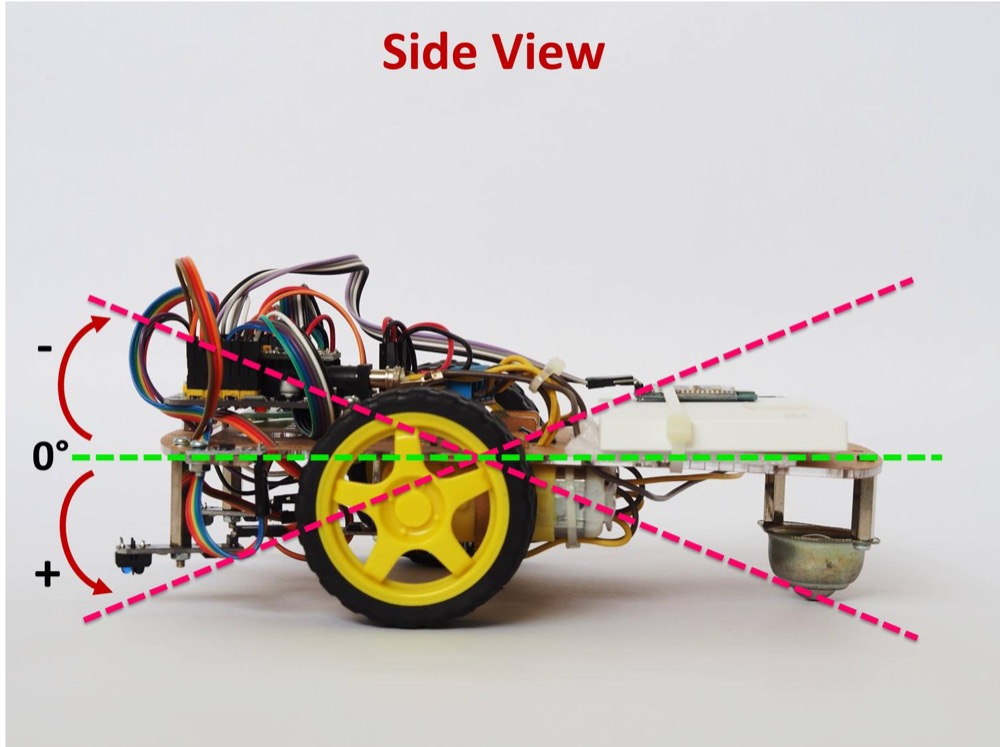
- Top view
- Controller board : บอร์ด Arduino Pro Micro ทำหน้าที่ควบคุมการทำงานของหุ่นยนต์ นับเป็นหัวใจหลักของหุ่นยนต์
- Reset switch : สวิตช์สำหรับสั่งให้หุ่นเริ่มการทำงานใหม่
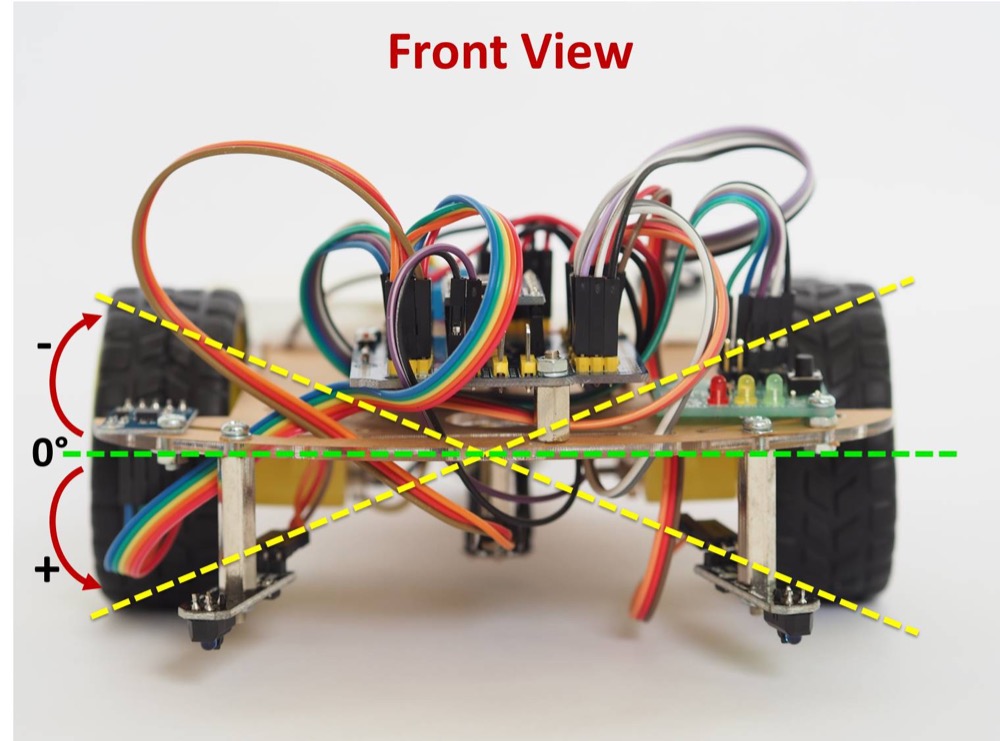
- Accelerometer : เซ็นเซอร์วัดความเอียงของหุ่นยนต์
- Basic I/O board : บอร์ดแสดงผลอย่างง่าย ประกอบด้วยไฟ LED 3 ดวง
- On/Off switch : สวิตช์สำหรับเปิด ปิด หุ่นยนต์
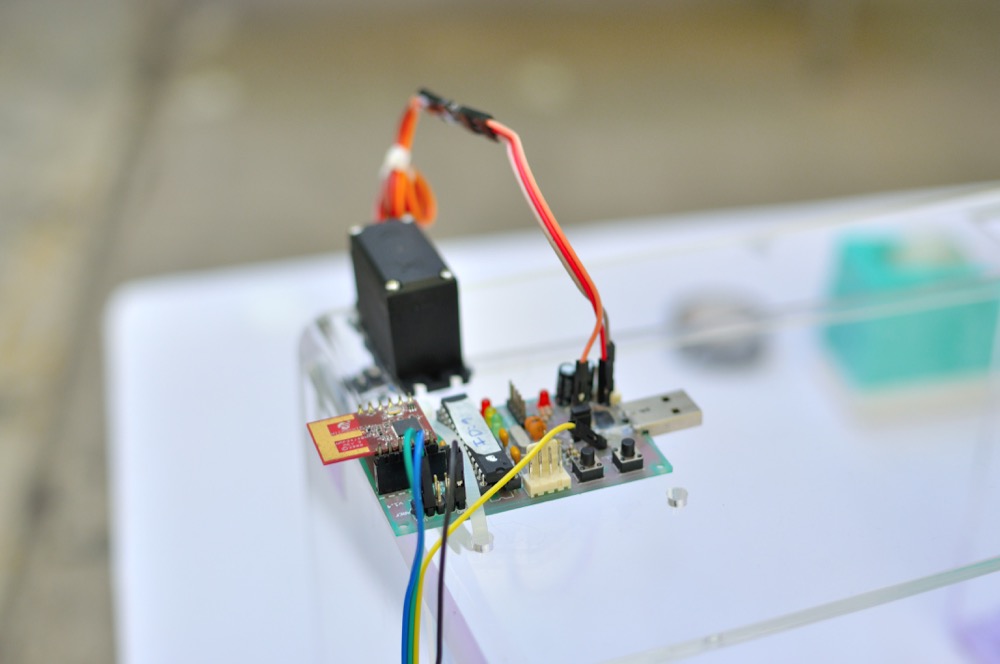
- Bluetooth module : อุปกรณ์สื่อสารแบบบลูทูธ เพื่อให้หุ่นยนต์อัศวินและหุ่นยนต์ผู้ช่วยสามารถสื่อสารกันได้
- Power bank : อุปกรณ์จ่ายไฟให้กับหุ่นยนต์
- Wheel : ล้อขับเคลื่อนหลัก 2 ล้อ พร้อมล้อพยุงด้านหลังอีก 1 ล้อ
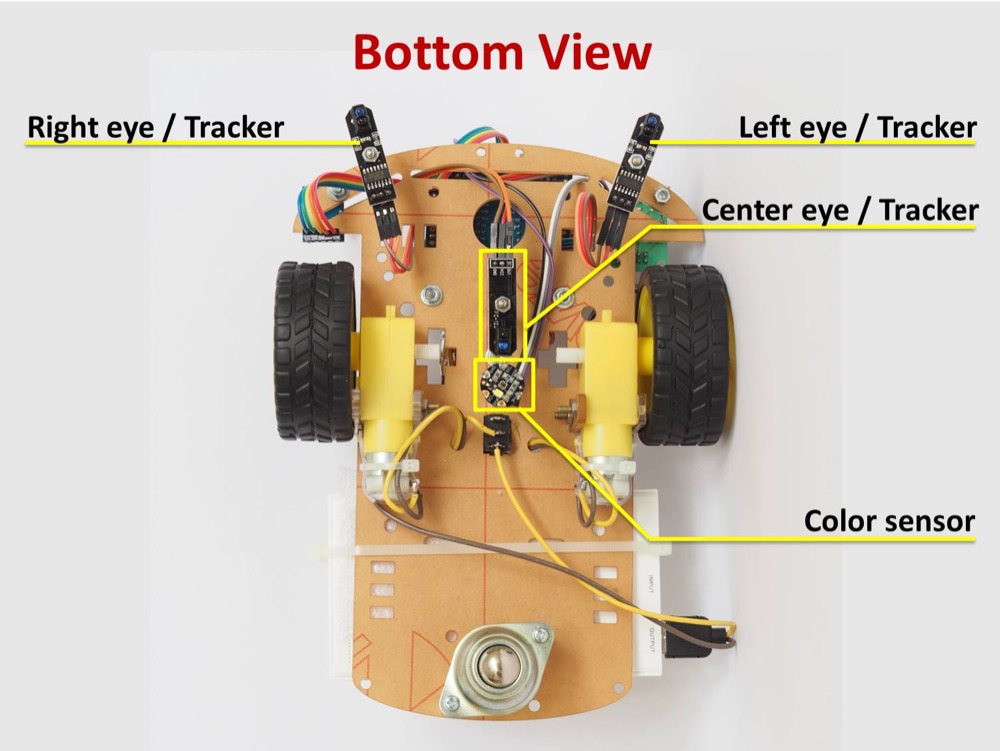
- Bottom view
- Tracker : เซ็นเซอร์วัดแสงสะท้อนแบบ infrared สำหรับการเดินตามเส้น มี 3 อัน ได้แก่ left eye, right eye และ center eye
- Color sensor : เซ็นเซอร์สำหรับวัดค่าสี
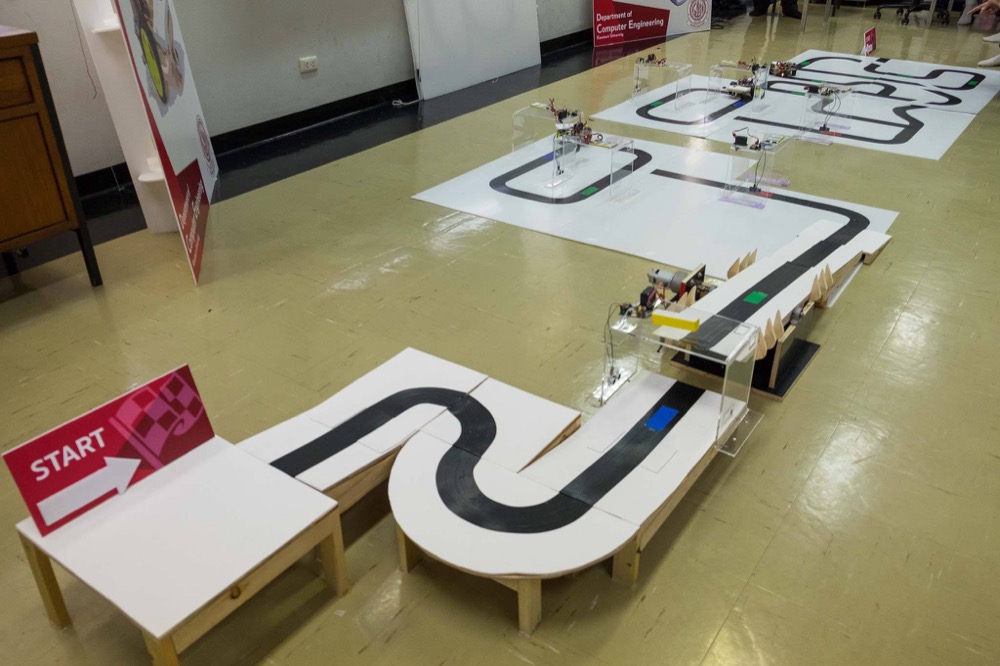
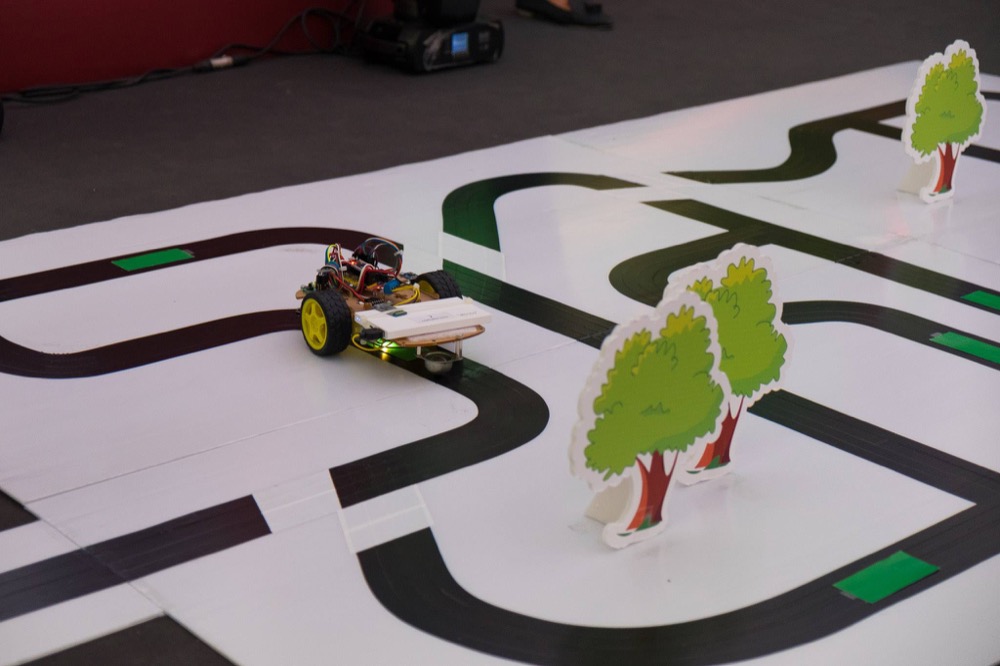
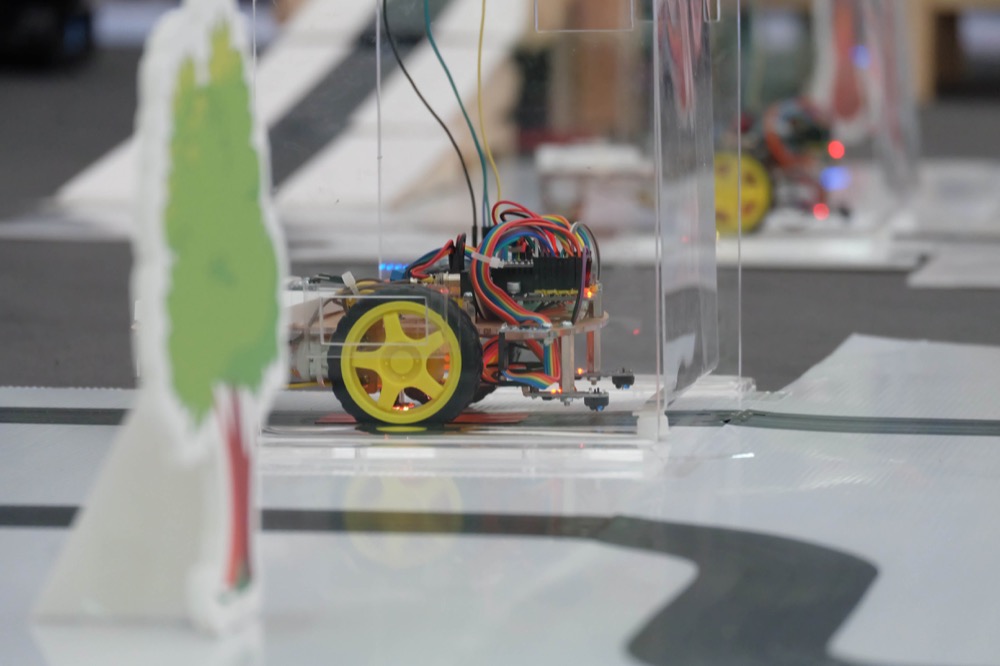
สนามแข่ง
ส่วนประกอบของสนามแข่ง
- พื้นสนาม
- เส้นนำทาง
- จุดสีบนพื้น
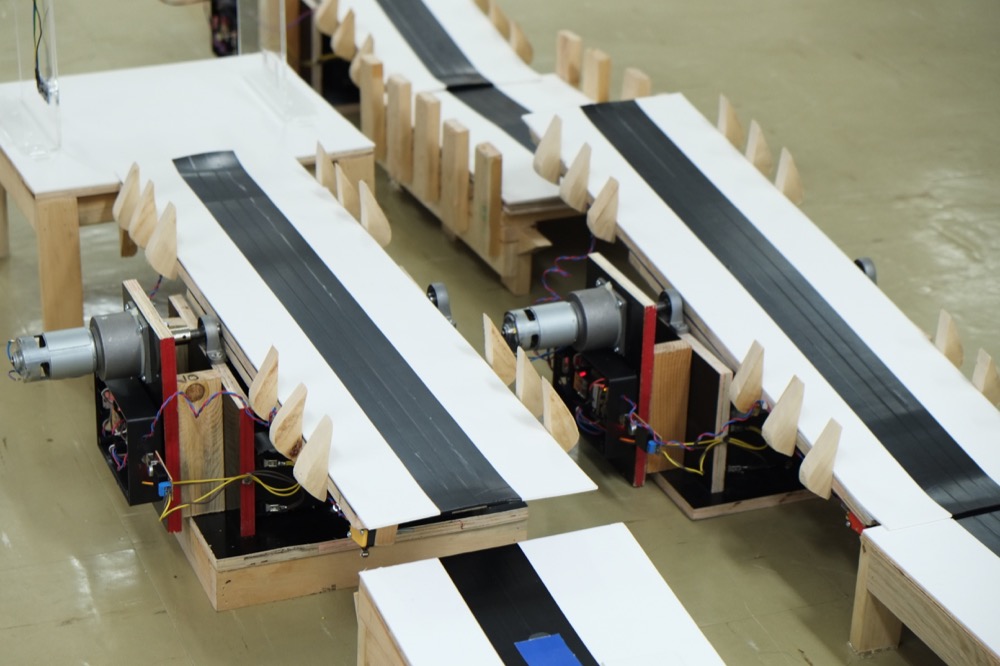
- สะพานกล
- กล่องตรวจจับหุ่นทั้งแบบมีและไม่มีบานประตู
 |
 |
 |
 |
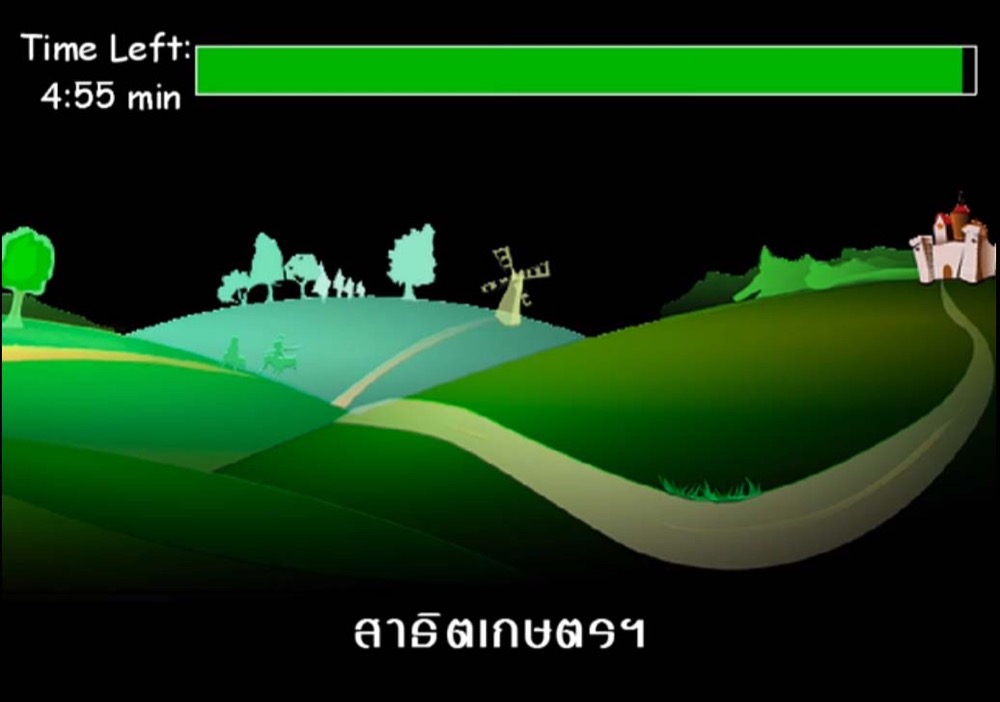
สถาปัตยกรรมการเชื่อมโยงกลไกในสนาม
กล่องตรวจจับหุ่นแต่ละกล่องจะคอยรายงานสถานะการตรวจจับหุ่นของตนและส่งสัญญาณมาที่แอพพลิเคชันส่วนควบคุมกลาง ผ่านทางการสื่อสารไร้สาย IEEE 802.15.4 เพื่อตรวจสอบเงื่อนไขและส่งสัญญาณควบคุมกลับไปยังสะพานกลและประตู พร้อมกันนั้น ก็มีการเปลี่ยนอะนิเมชันและเพลงประกอบเพื่อเล่าเรื่องให้สอดคล้องกัน ตามสถานะปัจจุบัน
|
 |
 |
 |