




Technical information of KU Corobots and arena
 |
 |
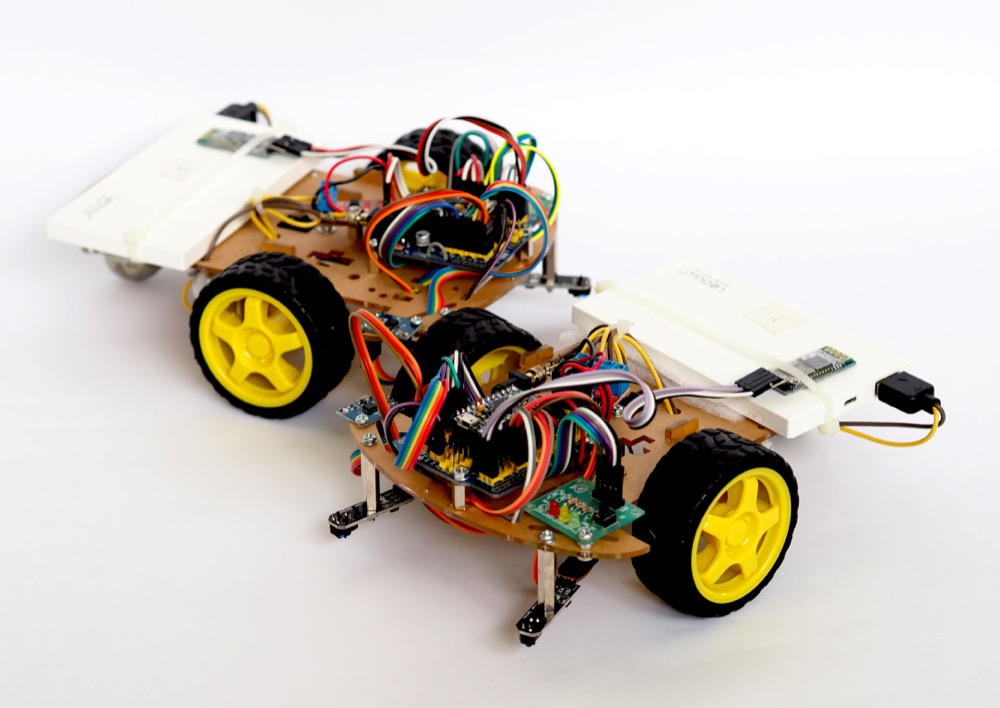
Each group will have a pair of identical KU Corobots. Each robot has its own arena which is dependent upon the other; they have to work together however.
KU Corobots
 |
 |
 |
 |
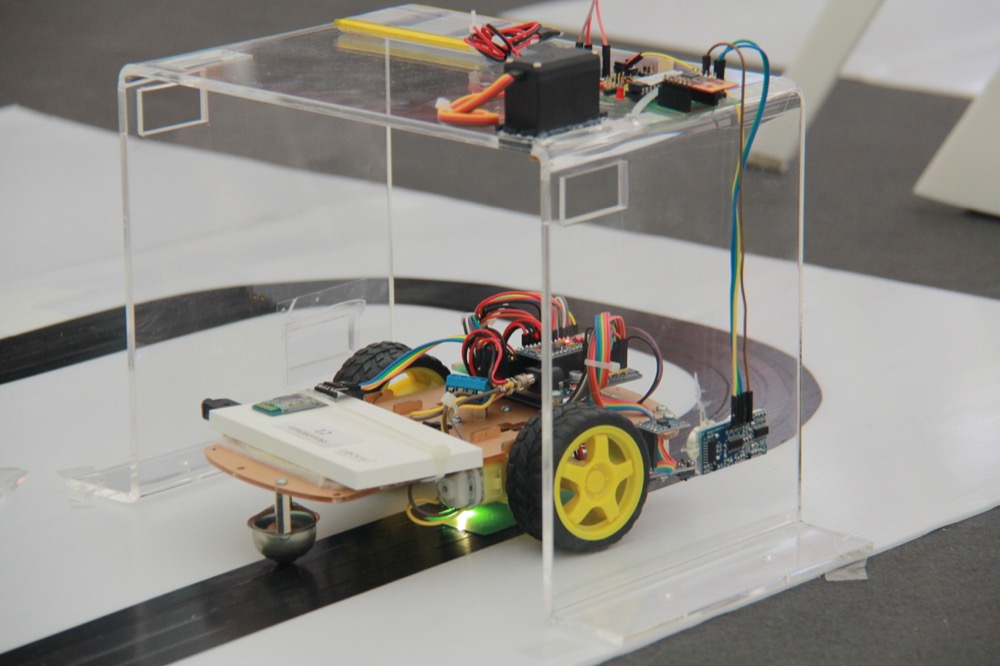
Both robots have the same component as the following.
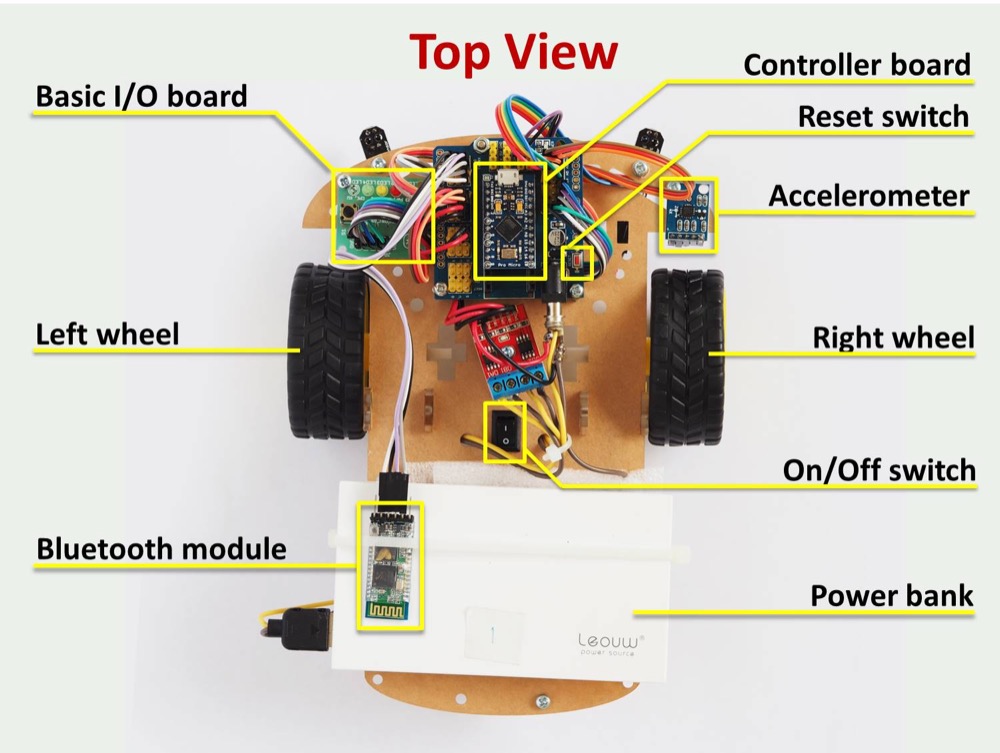
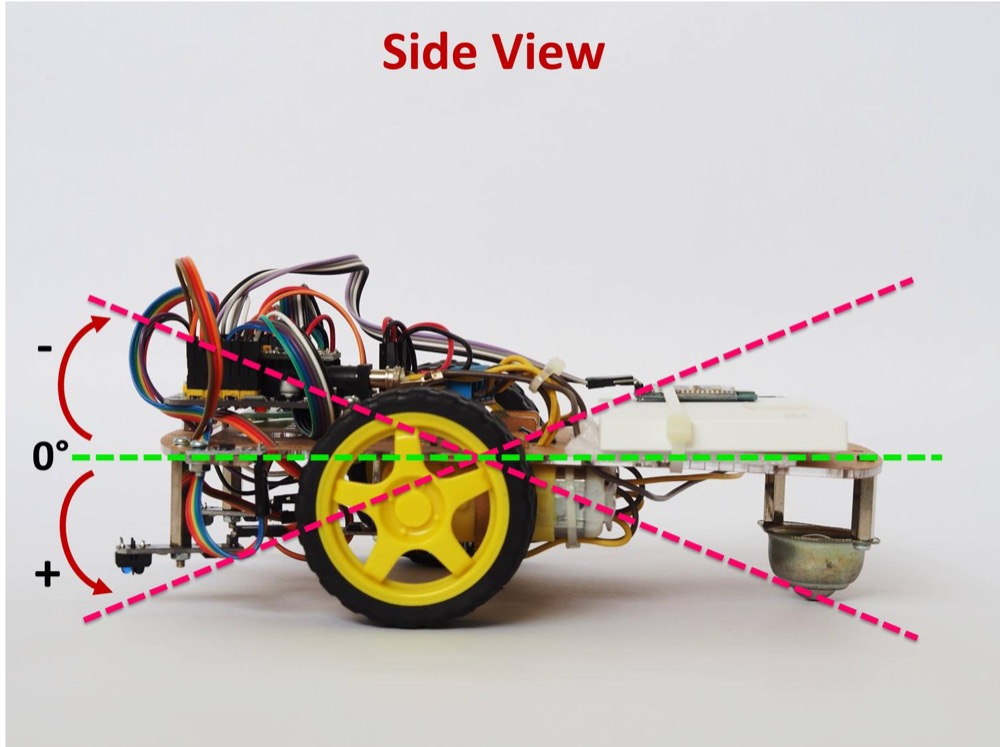
- Top view
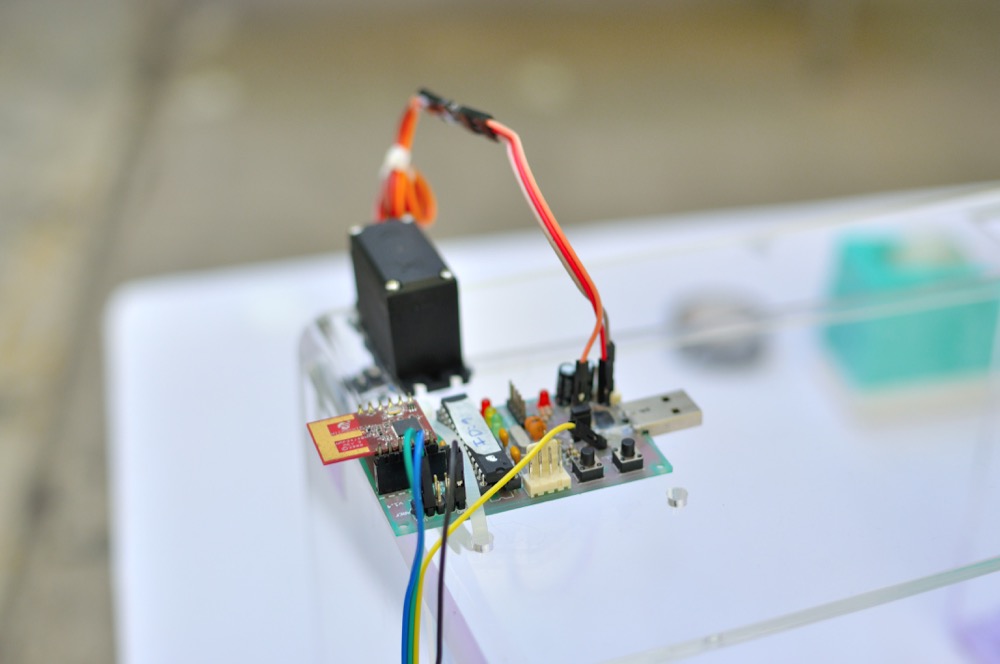
- Controller board (Arduino Pro Micro)
- Reset switch
- Three-axis Accelerometer
- Basic I/O board
- On/Off switch
- Bluetooth module
- Power bank
- Two driving wheels and one supporting wheel
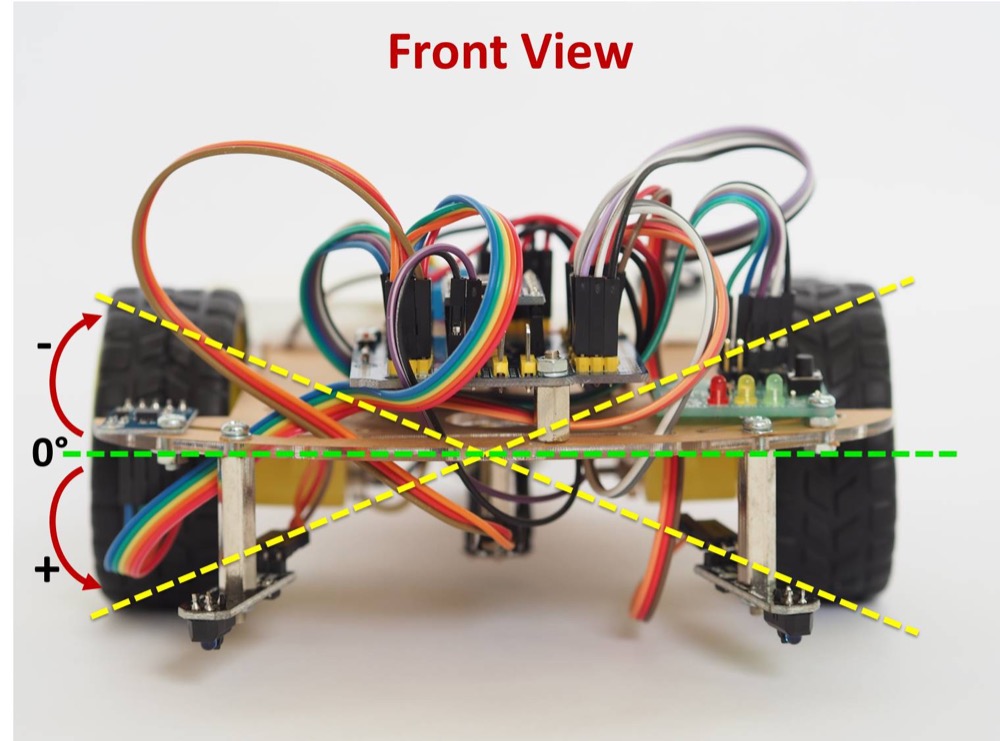
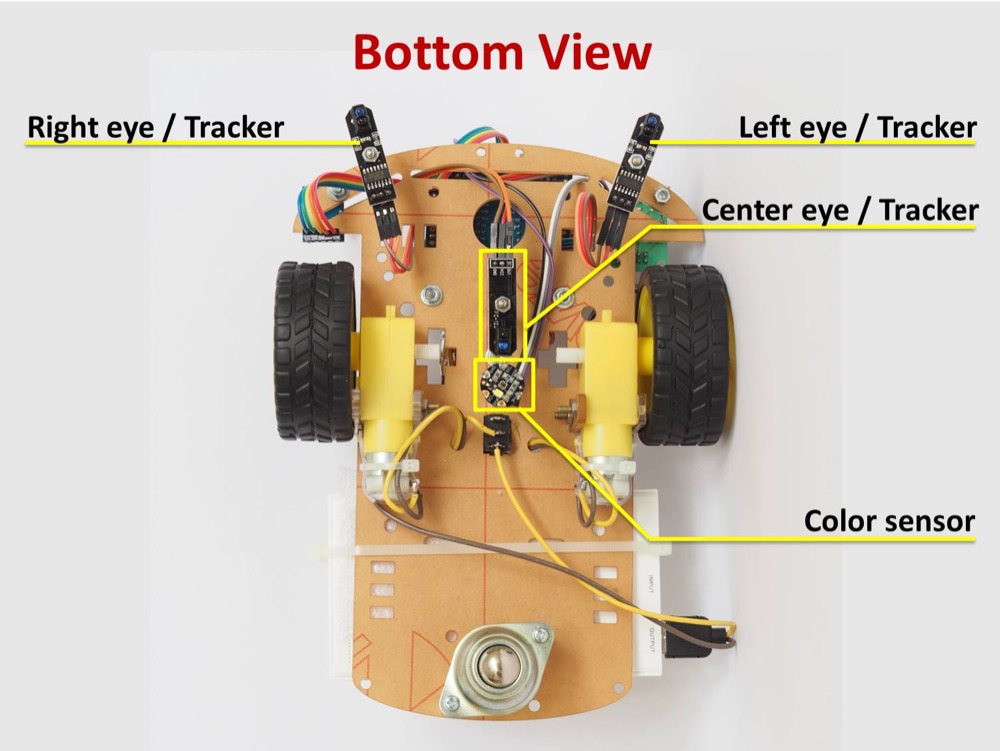
- Bottom view
- Three line trackers (left eye, right eye and center eye)
- Color sensor
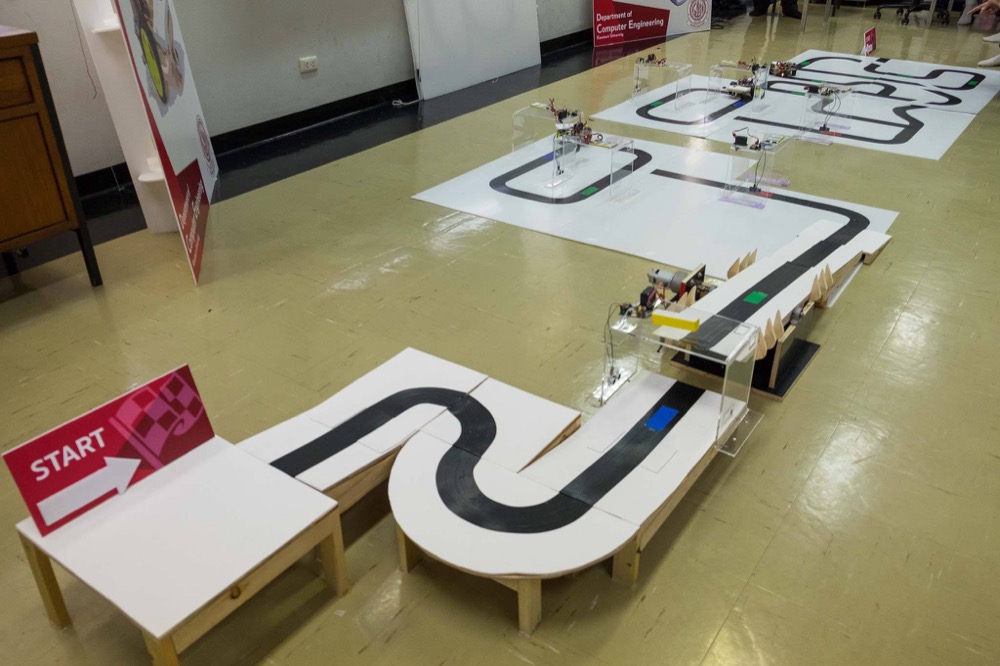
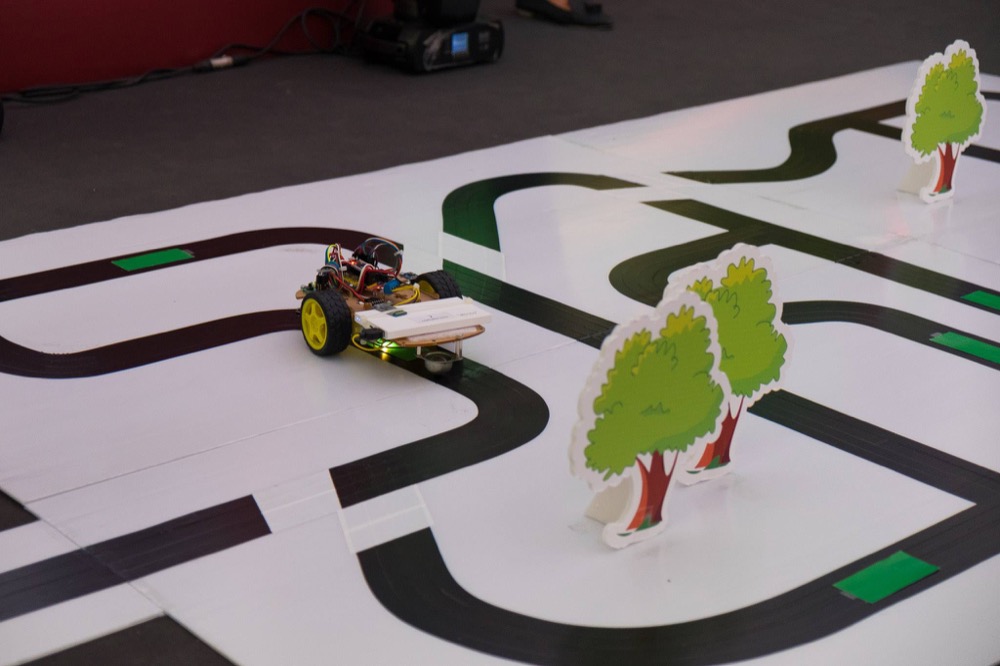
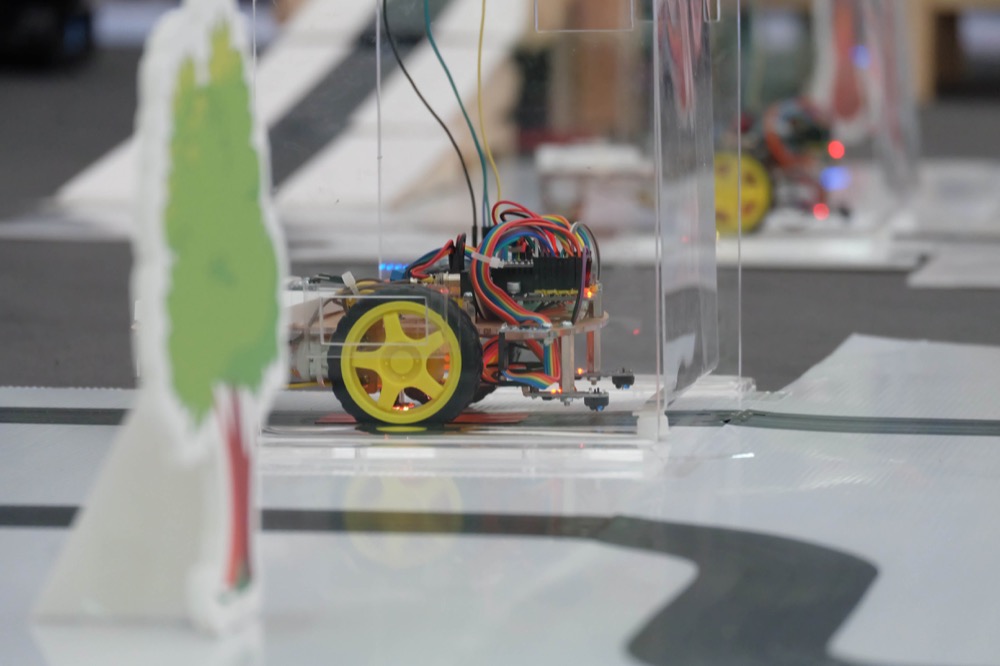
Arena component
- White floor
- Guiding black lines
- Short color strips
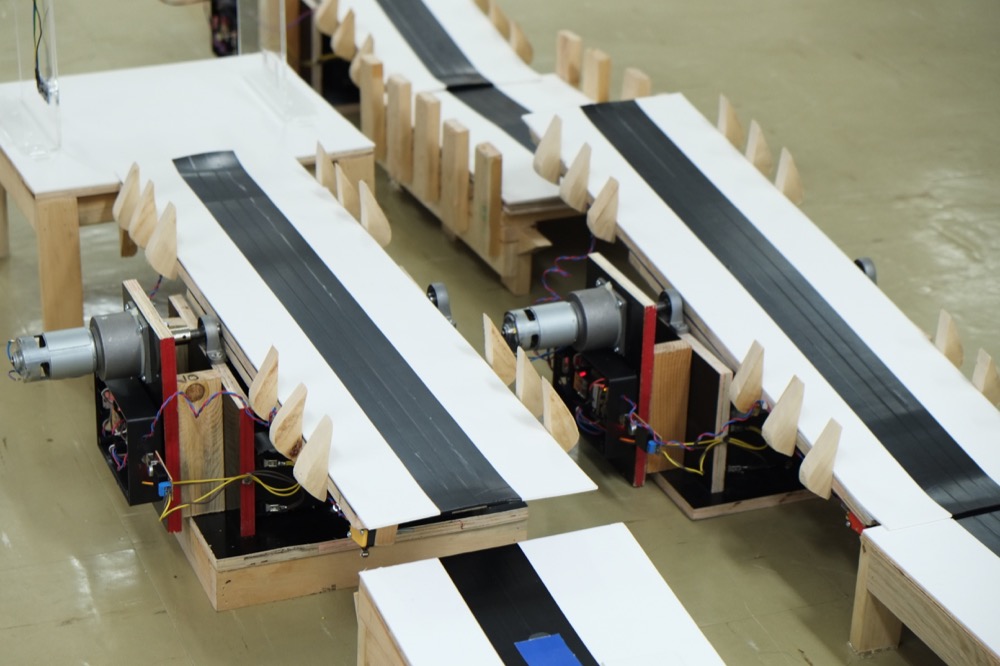
- Mechanic bridges
- Corobot detector boxes (with and without swinging doors)
 |
 |
 |
 |
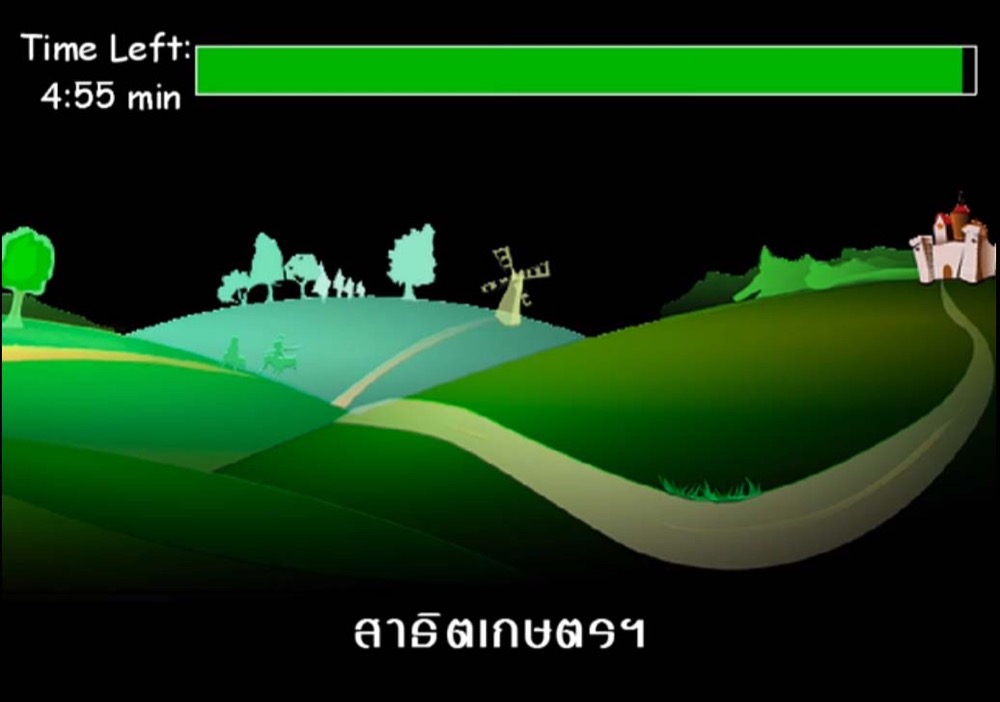
Arena control mechanism architecture
The main control application keeps track the robot position from the signals reported by the Corobot detector boxes. When a robot moves to the Corobot detector box, the box sends a message to the application via IEEE 802.15.4 to the application. The application checks the task condition and sends messages to control the mechanic bridge and the door. At the same time, the application updates the animation on the screen and the background music to match the current situation.
|
 detector box sends a message to main control application when a robot is in the box. |
 |
 |